
Hello! My name is Rafael Salcedo, a senior Computer Science major from
Cal Poly.
This website is a quick portfolio that lays out my favorite projects. I
have more passion projects that are honorable mentions. I would be more
than glad to talk about said projects upon inquiry.
I have enjoyed my time at Cal Poly and I would describe it as demanding
"adaptability".
Maintaining a high GPA as a full-time student with extra-curriculars was
a great learning opportunity.
I've spent a lot of time on embedded programming, becoming fluent with
operating systems and creating autonomous processes.
C, Python, and Java are my strongest languages as I've continually used
them on projects. CSS, Typescript, and HTML are next in line.

As I've worked on these projects and in school, I have considered myself a quick learner I have reviewed large codebases and utilized custom libraries under deadlines. I am no stranger to learning new tools like services, game engines, and frameworks.

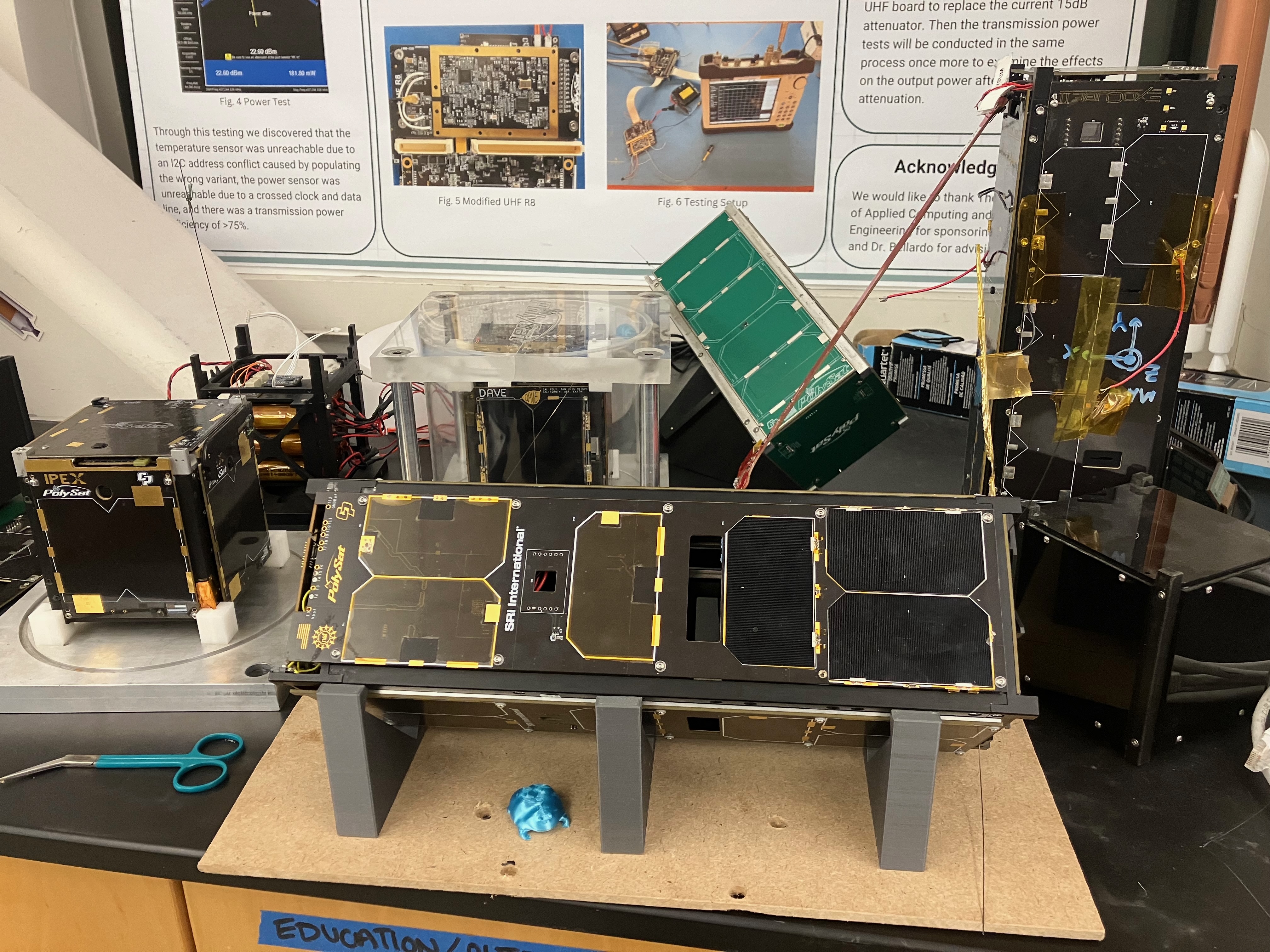
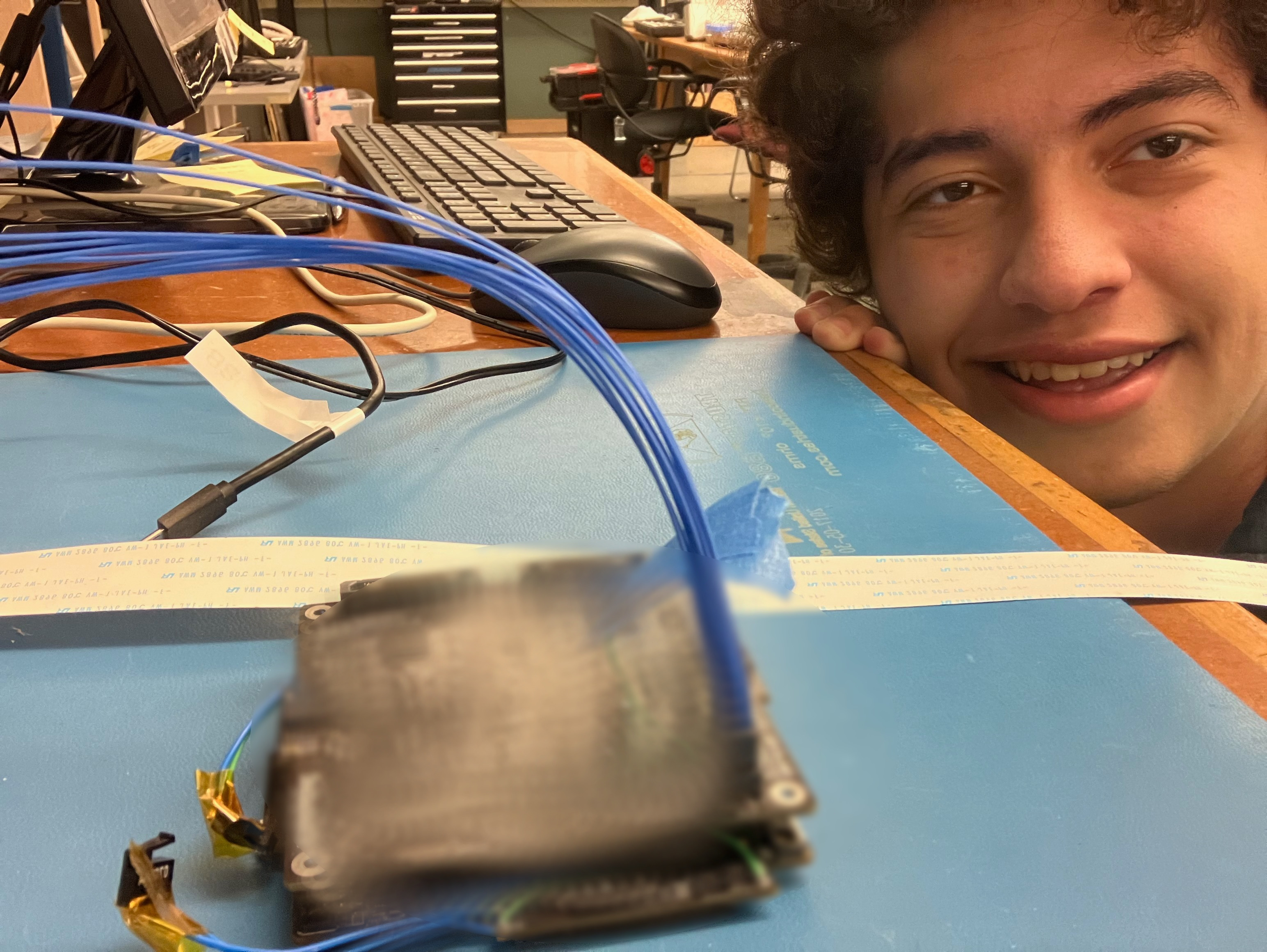
Cal Poly CubeSat Laboratory, AKA PolySat, is research lab that has built
16 satellites since 2003
With the 16th undergoing its final revisions and tests, I was
responsible for parts of its software.
SAL-E will be launched February 2025 on Transporter-16, to get to this
point I had to work with the rest of the multidisciplinary team with
strict deadlines. I handled this work enviroment quite well as I
significantly contributed to meetings and workload
Specifically, I was solely responsible for interfacing with one of the
two payload devices on this satellite. I had to take part in developing
the firmware on the device to ensure we could communicate with this
device via UART

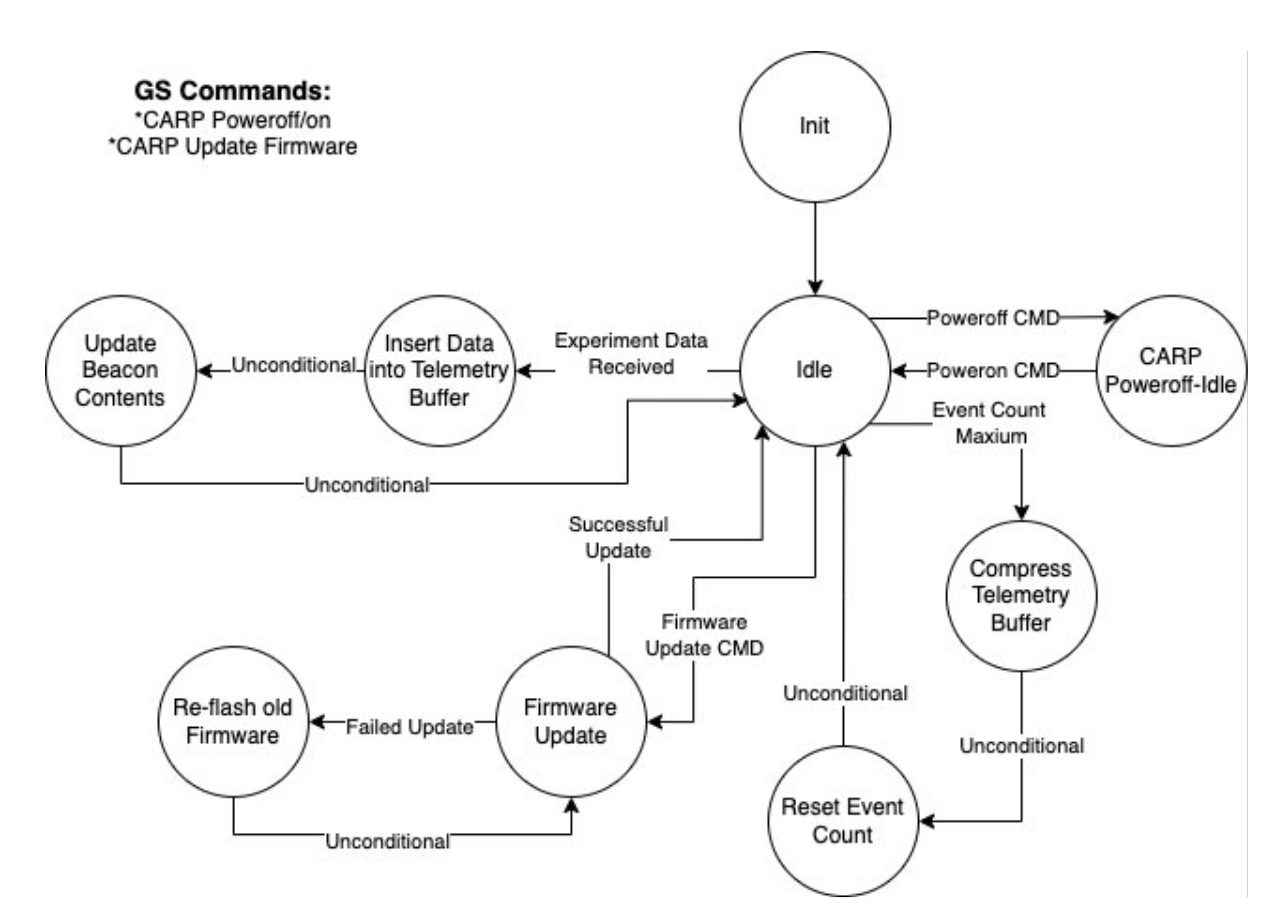
I created an autonomous process to communicate with the payload device with a self-made SLIP packet structure. Restarts, ground station cmds, and downlinking data are managed by other core processes via sockets with my process.
Most of my work was written in C and XDR, to be compiled using buildroot
and then flashed onto a systemboard
My favorite part about working with this environment was the tangibility
of being able to interact with all of the executables and drivers on the
satelite and running/loading them manually to test their behaviours.
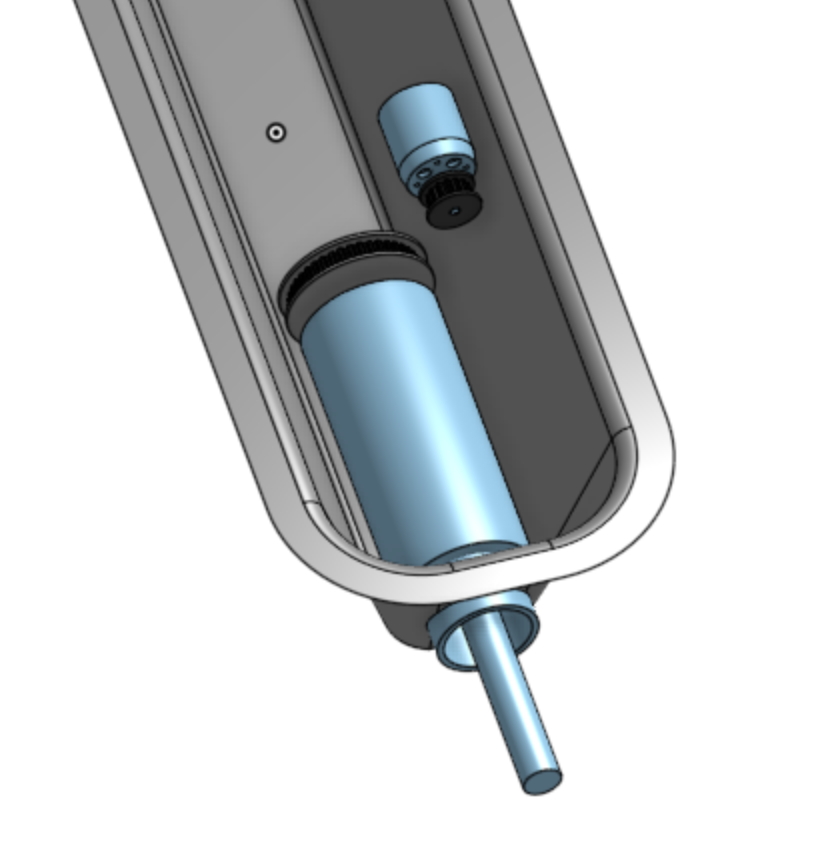
The Cal Poly Robotics Club has several multi-disciplinary projects
including an autonomous vessel. The hull of the vessel is entirely made
of carbon fiber. GPS, radio, gyro, and LattePanda board sealed within.
The unique aspect of working on the vessel compared to the satellite was
the lack of a codebase. Rather than requiring me to read through decades
worth of codebases and custom libraries, I was the one creating them.

Communication was the first thing we had to sort out, as the vessel
needed to take commands and send its status This would be achieved over
a LoRa radio with a custom data transfer protocol.

Working on the vessel gave me a lot of experience with python, since it
was the language used to set up the radio and gps.
Any data collected from said instruments including readings from a
temperature sensor would be sent to the National Centers for
Enviromental Engineering.

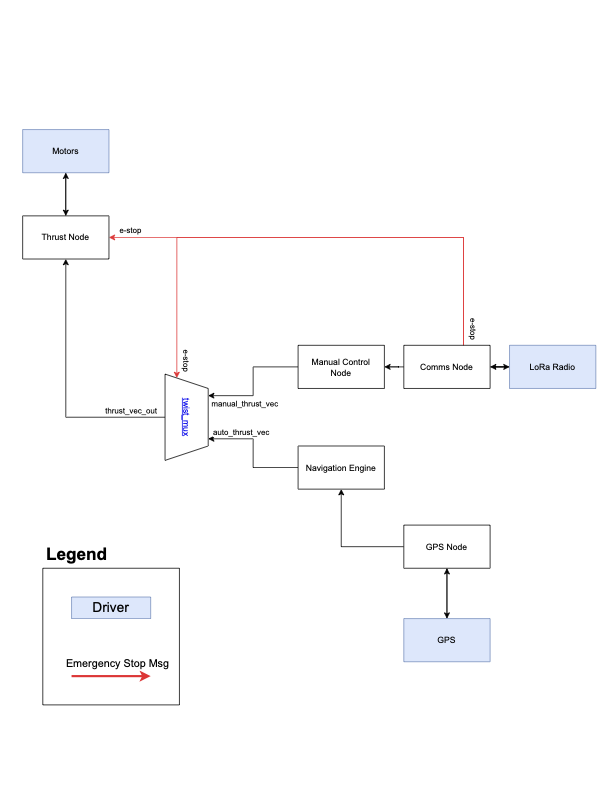
To go more in depth on how I setup the radio and gps, I learned ROS2 to
create an entire network of listening/subscribing processes.
This created a level of abstraction allow for the boat to use the
radio/gps devices, while allowing for a nearby computer to update its
control panel based on recieved radio packets. The control panel was
built up to be a local webpage running on a computer within distance of
the radio.
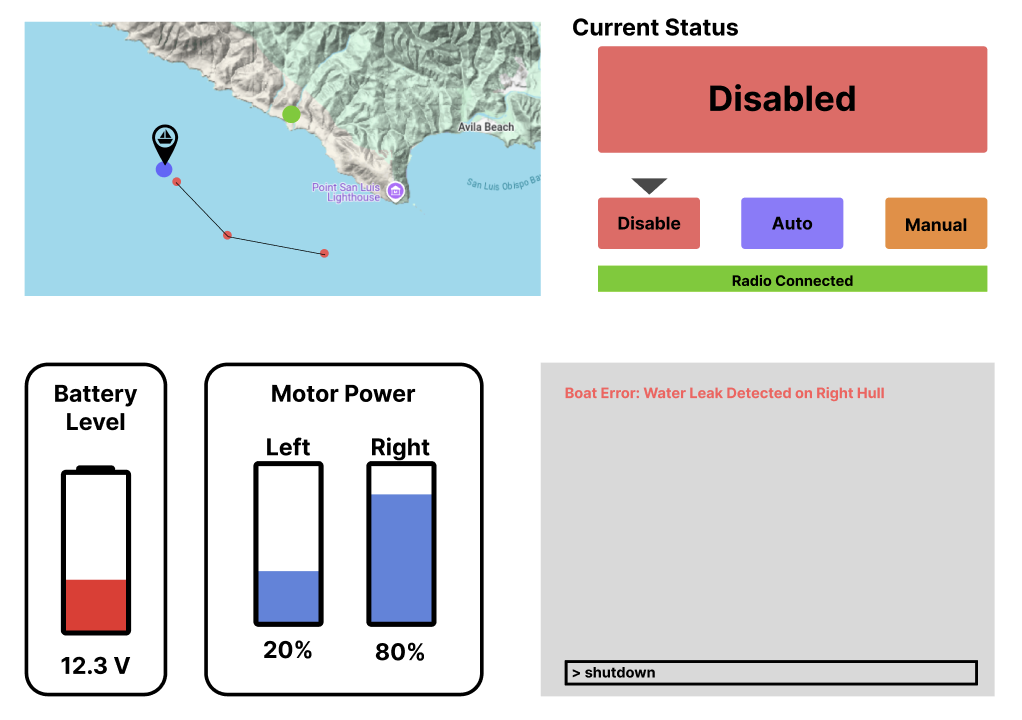
I got to design the control panel, the one shown to the left was the prototype. To build the control panel, we used a combination of Django/Node.js and I learned Tailwind and Typescript.
The phishing site was never deployed and was created with approval from
CalPoly faculty.
For more in depth explanation, here is the link to the repository for
the project and a link to the report made for the project
Repository:
https://github.com/rafpug/Phishing
Report: View
I got to flesh out my knowledge as I worked on the full stack, specifically I solely completed the authentication system/tokens on both frontend and backend. Same with the frontend for login/signup, home page, kitchen page, adding new kitchen/inventory/item. The skeleton for the backend API and backend database services were created by me. CI/CD was the only area that I didn't contribute the majority of effort on the team.
SIDER was a group project I worked on to make an inventory web application. The point of the project was to practice software engineering principles, as it was broken up into three sprints that were 2 weeks long each.
Repository:
https://github.com/dash-org/csc_307_group_project
Deployed App:
https://yellow-flower-0dfae081e.3.azurestaticapps.net/
(* If the URL doesn't work, then the app is likely no longer deployed )